Extension Kalman Filter算法
-
EKF全称ExtendedKalmanFilter,即扩展卡尔曼滤波器,一种高效率的递归滤波器(自回归滤波器)。
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全包含噪声的测量(英文:measurement)中,估计动态系统的状态。
这种滤波方法以它的发明者鲁道夫.E.卡尔曼(Rudolf E. Kalman)命名。然而简单的卡尔曼滤波必须应用在符合高斯分布的系统中,后期的学者对其进行了多方面的改进,其中之一就是扩展卡尔曼滤波,可应用于时间非线性的动态系统。
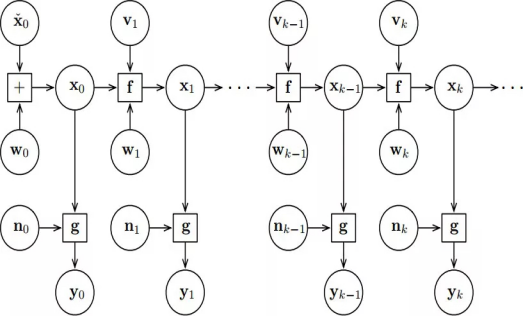
以自动驾驶为例,图中符号的含义如下:xˇ: 设计的轨迹,比如预先计算得出的理想轨迹。 w: 驾驶过程中各种操作引入的噪声,称为过程噪声。x: 在理想轨迹之上混入了过程噪声的真实轨迹。 t 下标表示时间。 n: 观测噪声。y: 观测数据:对真实轨迹的观测,其中包含观测噪声。

西南地区IT社群(QQ)
- 云南
- 【昆明网页设计交流吧】243627302
- 【昆明nodejs交流吧】 243626749
- 【VUE】838405306
- 【云南程序员总群】343606807
- 【昆明UI设计】104031254
- 【云南软件外包】15547313
- 贵州
- 【PHP/java源码/站长交流群】55692114
- 四川
- 【成都Java/JavaWeb交流】86669225
- 【vaScript+PHP+MySql】116270060
- 【UI设计/设计交流学习群】135794928
- 重庆
- 【诺基亚 JAVA游戏博物馆】 559479780
- 【PHP,Java,Python,C++接单】 442103442
- 西藏